Grove - IMU 9DOF v2.0
Introduction
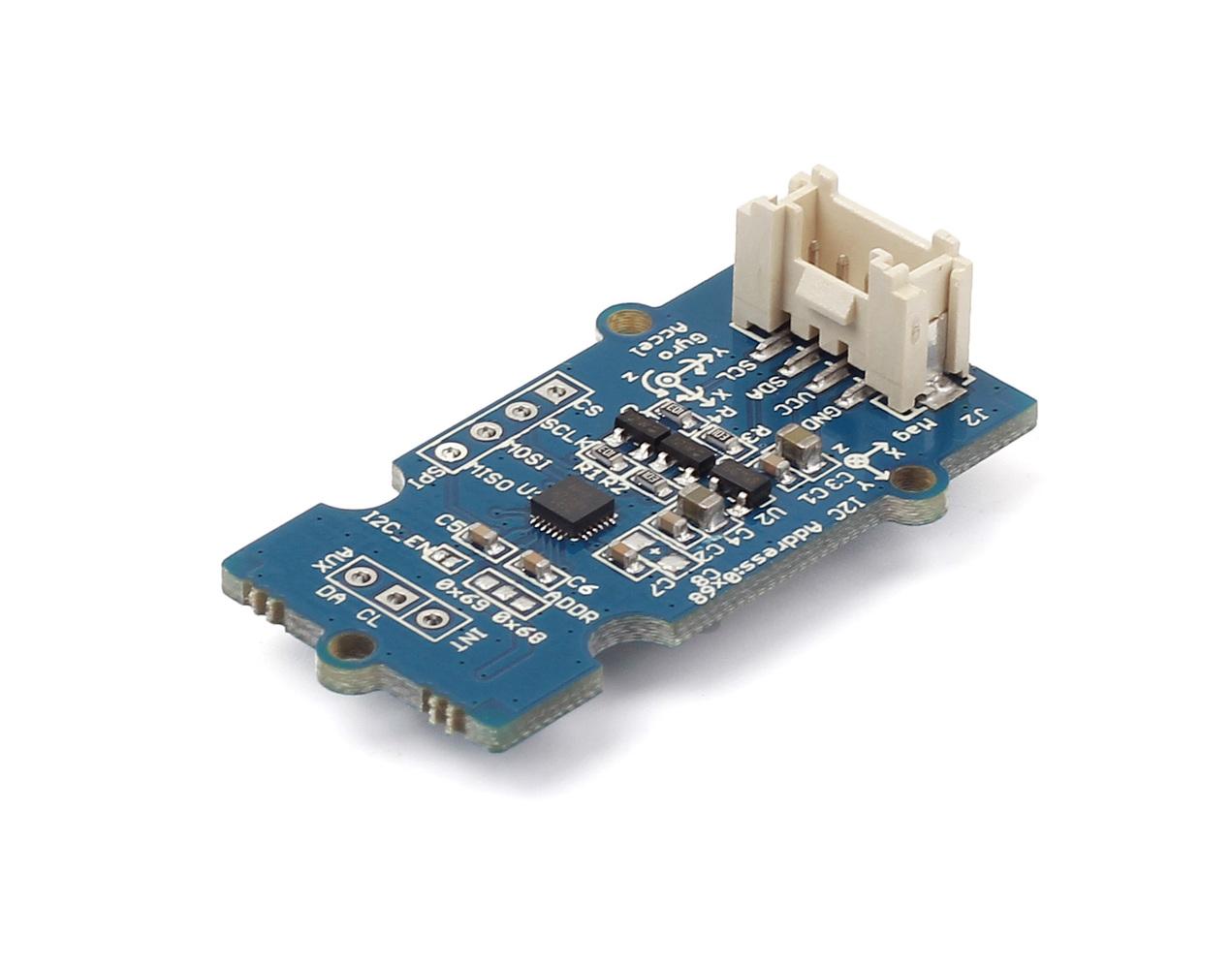
Grove - IMU 9DOF v2.0 is an upgraded version of Grove - IMU 9DOF v1.0 and it is a high performance 9-axis motion tracking module, which is based on MPU-9250. The MPU-9250 is an integrated 9-axis motion tracking device designed for the low power, low cost, and high performance requirements of consumer electronics equipment including smartphones, tablets and wearable sensors. MPU-9250 features three 16-bit ADC for digitizing the gyroscope outputs and three 16-bit ADCs for digitizing the accelerometer outputs and three 16-bit ADCs for digitizing the magnetometer outputs.

Specifications
- I2C/SPI interface
- Auxiliary I2C
- Low Power Consumption
- 400kHz Fast Mode I2C for communicating with all registers
- Digital-output 3-Axis angular rate sensors (gyroscopes) with a user-programmable full-scale range of ±250, ±500, ±1000, and ±2000°/sec
- Digital-output 3-Axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g
- Digital-output 3-Axis accelerometer with a full scale measurement range is ±4800μT
Tip
More details about Grove modules please refer to Grove System
Platforms Supported
Hardware Overview
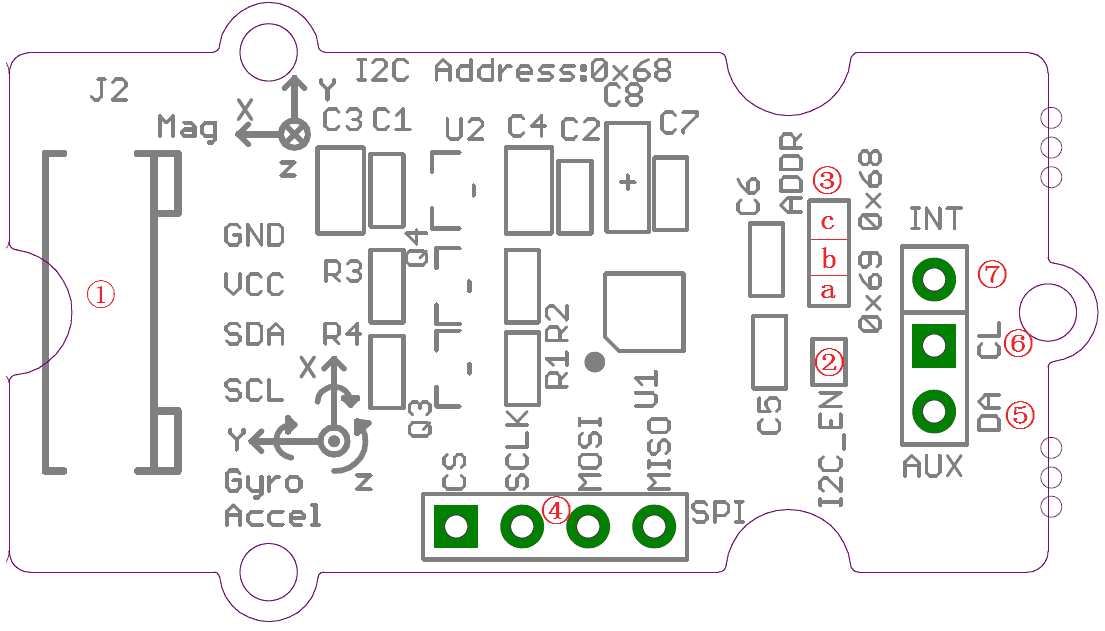
① - Grove interface,connect to I2C
② - I2C or SPI select pad(default is I2C), if want to use SPI, disconnect this pad
③ - Address select pad, default connected b and c address is 0x68, if connect b and a address is 0x69, if want to use SPI, disconnect this pad to either side.
④ - SPI Interface
⑤ - Auxiliary I2C master serial data
⑥ - Auxiliary I2C master serial clock
⑦ - Interrupt digital output
Usage
Based on library,we can display value of Accel&Gyro&Magnet on serial monitor. Now let’s show how to use the module.
Hardware Installation
Hardware installation is very easy, because there’s an I2C Grove in Seeeduino, so what we need to do is connect it to I2C Grove via a Grove cable.

Software Part
- Download the library.
- Unzip libraries into the libraries file of Arduino IDE by the path: ..\arduino-1.0.5\libraries.
- Unzip IMU_9D0F_Demo file into the libraries file of Arduino IDE by the path: ..\arduino-1.0.5\libraries.
- Open the code directly by the path: File -> Example -> Grove_IMU_9DOF_9250
- Upload the code. Note that you should select the correct board type and COM port.
- You can see :
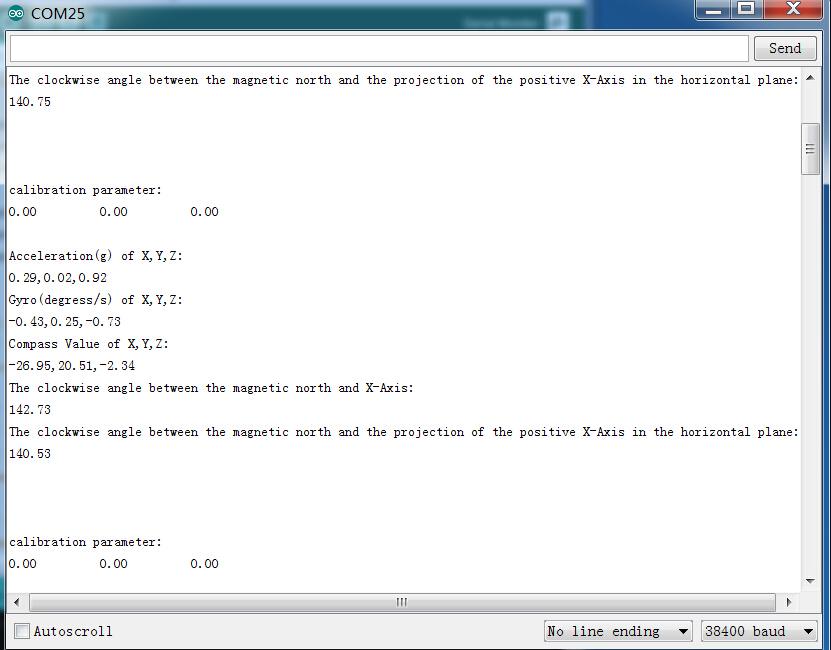
In static state,the z-Axis output value is about 0.98g,so you can refer to this to test if your sensor can work normally.
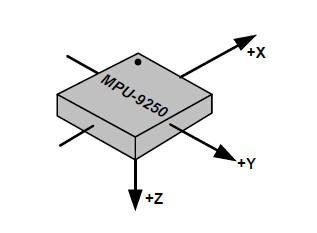
Orientation of Axes
The diagram below shows the orientation of the axes of sensitivity and the polarity of rotation.Note the pin 1 identifier (•) in the figure.
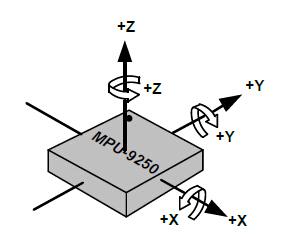
Orientation of Axes of Sensitivity and Polarity of Rotation for Accelerometer and Gyroscope
Orientation of Axes of Sensitivity for Compass
Resources
- Grove - IMU 9DOF v2.0 Eagle File
- MPU-9250 datashet
- MPU-9250 Register Map
- Grove - IMU 9DOF v2.0 library
| Arduino | Wio | BeagleBone | Raspberry Pi | LinkIt ONE |
|---|---|---|---|---|
Caution
The platforms mentioned above as supported is/are an indication of the module's hardware or theoritical compatibility. We only provide software library or code examples for Arduino platform in most cases. It is not possible to provide software library / demo code for all possible MCU platforms. Hence, users have to write their own software library.
Help us make it better
Welcome to the new documentation system of Seeed Studio. We have made a lot of progress comparing to the old wiki system and will continue to improve it to make it more user friendly and helpful. The improvement can't be done without your kindly feedback. If you have any suggestions or findings, you are most welcome to submit the amended version as our contributor via Github or give us suggestions in the survey below, it would be more appreciated if you could leave your email so that we can reply to you. Happy Hacking!